



























Testimonials
— Dr. Mark A. Richards, Georgia Institute of Technology, Atlanta, USA
“This book is absolutely unique in its focus on hands-on construction and demonstration of a variety of small, low-power, short-range radar systems. It is supported by extensive online support resources: measured data sets, MATLAB® analysis software, additional documentation, and demonstration videos. With the aid of this book, anyone with basic electronic circuit skills can construct and operate their own small radar systems and demonstrate essential radar techniques, from such basic operations as moving target detection and speed measurement to sophisticated imaging methods. It is no exaggeration to say that no other book compares with this one. There are many books on radar systems generally and radar signal processing specifically, and also a few books or chapters in edited books that specifically address FMCW radar, but none has the emphasis on practical radar construction with detailed circuit design and experimental data seen in this text. Short-range radars are increasingly ubiquitous, not only in the traditional police, motion sensing, and proximity applications, but increasingly in automotive safety, through-wall imaging, and others. This book is a comprehensive guide to the technology of this increasingly important area.”
— Prof. Carey Rappaport, Northeastern University, Boston, Massachusetts, USA
“The book is applications-oriented with just enough information, delivered at just the right points, to give the reader a straightforward, clear understanding and appreciation of radar for practical applications. I can think of no other texts that specifically apply conventional radar theory to general short-range problems. As inexpensive imaging and short-range radars are becoming increasing prevalent, it is important that good texts be available to teach engineers about the right way to go about building radars and optimizing their performance. The selection and presentation of topics is perfect for the modern radar engineer. Proceeding from a general description of radar theory to specific radar systems to particular applications is logical and intuitive. Nothing within the scope of the book is left out: it is very complete. This book is a great reference, one that should be on every radar designer’s bookshelf. It is segmented enough with self-contained sections to make it easy to find solutions to specific engineering problems down the road. I particularly like the parallel structure of the various radar implementations. Giving the expected performance of each radar system, for example, guides the reader in his/her selection of a particular configuration for a given application. The references are numerous and complete, and the author is well-known as an active contributor in the radar field. In addition, the text provides sufficient theory to justify each next step. Unlike conventional radar texts, Charvat’s book gives the reader the knowledge and understanding to develop and use radars for practical, everyday applications. The presentation reminds me of a car-repair manual, with careful step-by-step instructions and well-illustrated with highlighted photographs and circuit diagrams, but with just enough math to justify the various approaches used.”
— Dr. Philip Erickson, Principal Research Scientist, MIT Haystack Observatory, Westford, Massachusetts, USA
“This textbook fills a large void by providing real world examples of Doppler, ranging, and synthetic aperture radar systems along with extensive examples of radar sensitivity and design parameters. Its coverage of fundamental radar principles in a form directly accessible to students is unique, and provides a needed hands-on based approach to the subject. It enables radar investigations using systems that can be readily built at reasonable cost, straightforward computer analysis code, and well verified test data. Students can use these features to learn radar by example in a manner previously very difficult to accomplish. The material fills a niche not currently found in the literature: real-world examples of small radar systems that can be implemented by students and professionals new to the field. There is a large need for such material in the university and educational community, as most radar courses feature large and complex system designs costing significant amounts of money. This fact tends to produce a large disconnect in student minds between the theory they are learning and actual practice in how to implement this theory. In other words, the student assumes that it must take a team of people and a lot of resources to successfully implement and deploy radar systems. However, the principles of radar work equally well on small systems. The ability to have students assemble, test, and process data from these systems is really invaluable. I have seen this type of hands-on learning provide insights and synthesis of material much quicker than traditional methods of learning important radar principles. Having a textbook with validated examples of small radar systems, and with simple computer code and test data sets to check knowledge of theoretical constructs, provides the needed bridge to this type of learning. The material is most definitely interesting, primarily by virtue of worked-out calculations giving real-world answers to common radar design problems (and then showing processed data examples). There are practically no sources of publicly available test data for SAR algorithms or for FMCW ranging radars. These worked-out examples are therefore unique and badly needed. I am impressed with the breadth of topics covered. For the target audience, this material seems ideally suited and I do not find any significant missing topics. After assimilating this material and working through the exercises, students will be much more ready to tackle the classic radar textbooks (Skolnik, etc.) and will have a much more intuitive feel for core principles.”
— Prof. Daniel Fleisch, Ph.D, Wittenberg University, Springfield, Ohio, USA
“I wish I had a book like this when I was developing short-range radars. The author provides a variety of practical circuits and block diagrams that practicing engineers and students will find useful. The best feature of this book is the wealth of practical information in the form of block diagrams, circuit diagrams, and measurement results that help the reader understand how to turn the theory of small radars into practice. I like the author’s approach of providing just enough theory to help the reader understand the operation of short-range radars and to interpret the measurement results. I’m not aware of any other book directed solely toward small and short-range radars. I believe this book is complementary to comprehensive treatments such as Principles of Modern Radar by Richards, Scheer, and Holm and Skolnik’s Radar Handbook.”
— Prof. Xiaoguang ‘Leo’ Liu, Ph.D, University of California, Davis, USA
“This book presents a nice introduction to short-range radar systems with both theoretical and practical insights. I would recommend it to anyone interested in not only understanding but also building short-range radar systems. The book covers all essential aspects of short-range low-power radar systems. A major strength of the book lies in the combination of both theoretical and practical insights. The examples provided in the book are particularly helpful in not only understanding but also in building actual systems.”
— Satyajayant Misra, from IEEE Wireless Communications - June 2015
“This book is one of the first to discuss short-range radar (SRR) systems in detail, from both theoretical and practical standpoints. The book is a good source of information about radar technology and the latest state of the art in small and shortrange radars.”
— IEEE Antennas & Propagation Magazine, August 2016
“Finally, bedtime reading for the radar enthusiast! Readers should not succumb to the unintended implication that this book will put them to sleep. On the contrary, this is an eye-opener. It is an interesting book that is quite easy to dip into. This book is a great reference for a hands-on approach toward understanding, construction, and use of a variety of home-made, short-range radar systems.”
— H.D. Griffiths, from The Aeronautical Journal, August 2019
“Although the majority of radar systems – for applications such as air traffic control, maritime navigation and military surveillance – are designed to detect and track targets at long range, there is an important class of radars that work at much shorter ranges. These are becoming more and more attractive for applications that include radar imaging from drone platforms, automotive radar (for collision avoidance and autonomous operation) and through-wall radar. This book therefore fills an important niche. Its author is well-qualified to write such a book, with a wide experience both in academic and industry research and development, as well as in amateur radio. The author’s background gives the book a strong practical approach, though not at the expense of rigour. It includes plenty of practical designs and examples of results, encouraging the reader to build and test the designs. It is organised in ten chapters: Chapter 1 covers the basics of radar; Chapters 2 and 3 describe Continuous Wave (CW) and Frequency-Modulated Continuous Wave (FMCW) radars; Chapter 4 covers Synthetic Aperture Radar (SAR) imaging; Chapters 5, 6 and 7 treat, respectively, small SAR systems, phased array radar and ultrawideband (UWB) impulse radar; Chapters 8, 9 and 10 cover different applications of short-range radars – police Doppler and motion sensors, automotive radar and through-wall radars. Authors from General Motors contributed to Chapter 9, thus ensuring that it is up-to-date and relevant. A supporting website provides MATLAB® simulation scripts and video demonstrations and every encouragement to contact the author to provide feedback and to ask questions. In summary, this is a rather unusual and attractive book that can be confidently recommended. It may be of particular value in the design of laboratory exercises for undergraduate and masters-level students, but also to those in academia and industry who research and develop radars in these new and increasingly important domains.”
— Chris Montoya - Director of Hardware Engineering at Humatics Corporation
“Greg is a great engineering leader, he has foresight and the ability to make quick tactical choices that help get the job done. Fourteen years into my career it’s difficult to find people to be mentors, I can also learn technical skills from. Greg provides that. He works long days when his team does. He gets his hands dirty and shares in the more mundane tasks with his team, while not getting to bogged down. Greg doesn’t suffer red tape to exist. Greg’s greatest skill is in remembering “perfect is the enemy of good enough” while still being able to appreciate the subtleness and art of good design work. Our industry could use more leaders in his ilk. I would welcome a chance to work with Greg in future.”
— Andrew Zai, PhD - Digital Phased Array Subject Matter Expert
“Before I met Greg, I had spent my career in defense and academia, institutions that don’t typically move quickly. Greg was the perfect mentor for my first role in a fast-paced technology startup. While we were still a small technical team, he would set audacious goals and would lead the technical team late into the night until we achieved success. As the company grew, progress became mired by process and meetings. Greg appropriately recognized that we were not at the correct stage for these measures, and that we needed to innovate quickly to survive. When progress had stalled long enough and we needed to deliver hardware to customers, the senior leadership of the company appropriately put him in charge of a 100-day sprint. His bias towards action is exactly what our technical culture needed to get the job done, and led to successful delivery of hardware to the customer. Greg has been one of the major influences in my career. If our paths cross again in the future, I would happily follow his lead again.”
— John Peabody Jr - Research Engineer at Butterfly Network, Inc.
“I worked for Greg on the Through Wall Imaging Radar (TWIR) after having been his office mate for about a year. Both as a project leader and an office mate, one quickly realizes that Greg is extremely passionate about his work. The TWIR project was a continuation of his Doctorate work and it was Greg’s passion that carried the small engineering team through to success. His ability to motivate, lead, and engineer simple, yet elegant solutions to technical problems is amazing.
I would recommend Greg for any position in which an enthusiastic and extremely knowledgeable Electrical Engineer is required.”
— Jim Scomazzon - Principal at CSC
“I would like to recommend my friend and associate, Gregory Charvat as a candidate for advancement in your organization. I have known Gregory for many years, and I have always been impressed with his drive, determination, and tenaciousness. Gregory possesses a strong natural talent for electronics design and development, and loves both old and new technology.
I watched him grow over the years from a boy tinkering with surplus gadgets that he picked up at swap meets; to a PhD in Electrical engineering.
Gregory Charvat would be an asset to any employer and I highly recommend him for any endeavor that he chooses to pursue.”
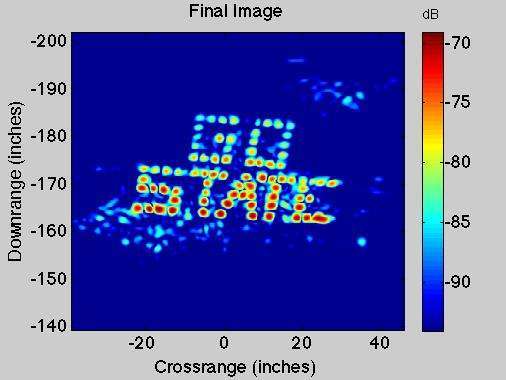
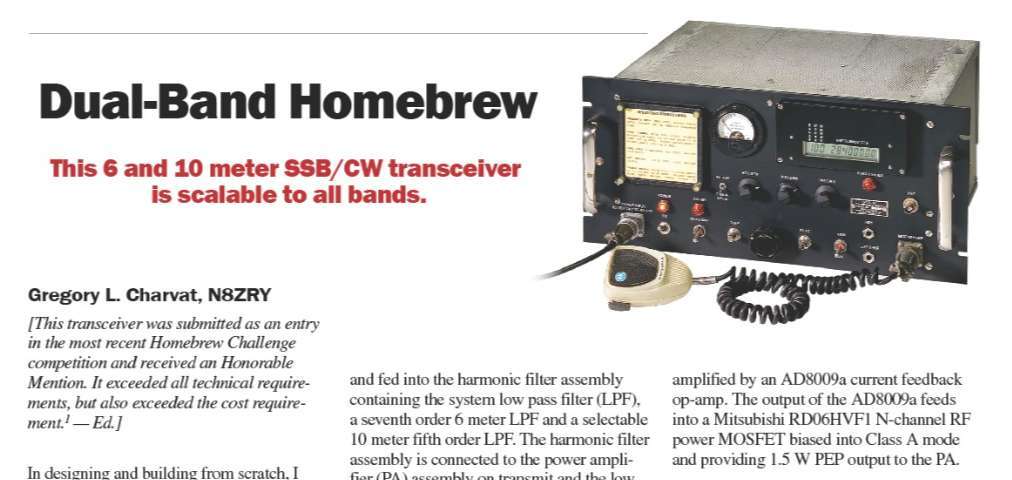
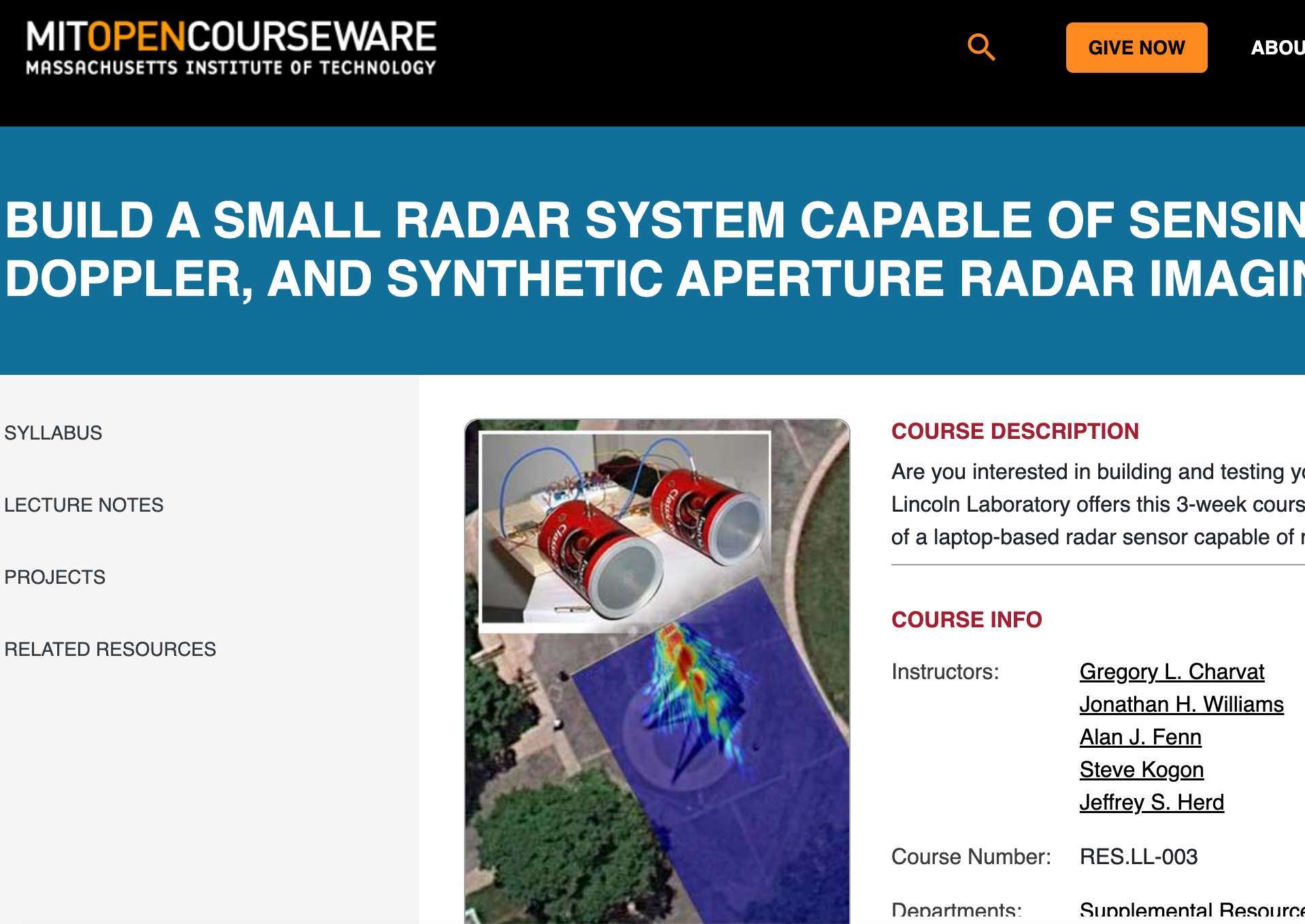
I’m a co-founder & serve as CTO at TeraDAR, author of the book Small & Short-Range Radar Systems. As CTO at Humatics Corporation, I created the Micro Location technology in my garage. As a 4c co-founder at Hyperfine ($HYPR on NASDAQ) & Butterfly Network Inc. ($BFLY on NYSE) I was responsible for prototyping their early proof-of-concept medical imaging systems that led to large fundraising rounds. As visiting research scientist at MIT Media Lab I created the Time of Flight Microwave Camera. As a technical staff at MIT Lincoln Laboratory, I made a through-wall radar imaging system that won the best paper at the 2010 MSS Tri-Services Radar Symposium and is an MIT Office of the Provost 2011 research highlight. I created the MIT ‘Build a Small Radar course’ (aka the coffee can radar course) which was the top-ranked MIT professional education course in 2011 and has become widely adopted by other universities, laboratories, & organizations. From this work >100 US & International Patents, >75 publications, >4000 citations. I’ve served as a guest commentator on CNN, CBS, Sky News, and as contributing author at Hackaday. Starting at an early age I developed numerous radar systems, over a dozen Synthetic Aperture Radar (SAR) imaging systems, phased array radar systems, other sensors, radio, and audio equipment.
